¿Qué es la autonomía de los vehículos?
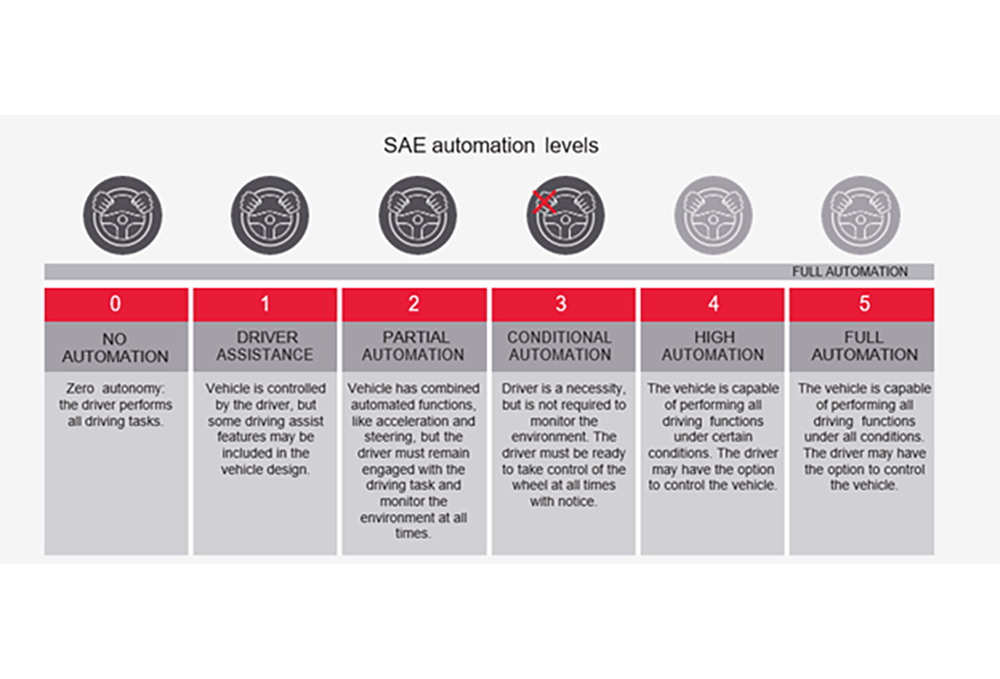
Un vehículo autónomo es aquel que cuenta con los sistemas informáticos necesarios para imitar las capacidades humanas en cuanto a la conducción, tanto por manejo como por control. A priori, se consideran vehículos autónomos aquellos que no necesitan conductor; sin embargo, el concepto sigue evolucionando y hay varios niveles de conducción autónoma:
- Nivel 0: Sin asistencia.
- Nivel 1: Conducción asistida.
- Nivel 2: Autonomía parcial.
- Nivel 3: Autonomía condicional.
- Nivel 4: Alta autonomía.
- Nivel 5: Autonomía completa.
La visión de los vehículos totalmente autónomos (niveles SAE 4 y 5) se acerca rápidamente. Hacer realidad esta visión requiere que los fabricantes de automóviles vayan más allá de los niveles actuales de autonomía de los vehículos para cumplir la promesa de sistemas de transporte altamente eficientes, más libertad para el conductor y una mayor seguridad para los pasajeros.
Te puede interesar: ¿Qué es el sistema ADAS?
¿Qué tan factible es la autonomía de los vehículos en el mundo?
Aunque las pruebas en carretera son una parte vital del proceso de desarrollo, el costo, el tiempo y el reto hacen que depender únicamente de las pruebas en carretera sea poco realista. Con este enfoque, los vehículos tardarían cientos de años en ser lo suficientemente fiables como para circular con seguridad por las carreteras urbanas y rurales el 100% de las veces.
Además, las soluciones actuales de pruebas en laboratorio ofrecen una visión incompleta de los escenarios de conducción y enmascaran la complejidad del mundo real debido a sus limitadas capacidades de campo de visión (FOV) horizontal o vertical, distancia mínima simulada y número de ecos por objetivo simulado.
Keysight Technologies reconoció este problema en 2021 cuando introdujo su simulador de distintos escenarios, que permite a los fabricantes de equipos originales probar en laboratorio varios escenarios de conducción complejos en el mundo real. La empresa ha mantenido su tecnología a la altura de las carencias actuales. El simulador de tráfico completo combina cientos de escenarios que representa hasta 512 objetos y distancias tan cercanas como 1,5 metros.
¿Cuál es el estatus de las pruebas que dirigen la autonomía de los vehículos?
Las pruebas en carretera del sistema integrado completo dentro de un prototipo o de un vehículo homologado permiten a los fabricantes de equipos originales validar el producto final antes de lanzarlo al mercado. Este sistema está ayudando a avanzar en el desarrollo de algoritmos mejor entrenados, con el objetivo de lograr una mayor seguridad general en la carretera.
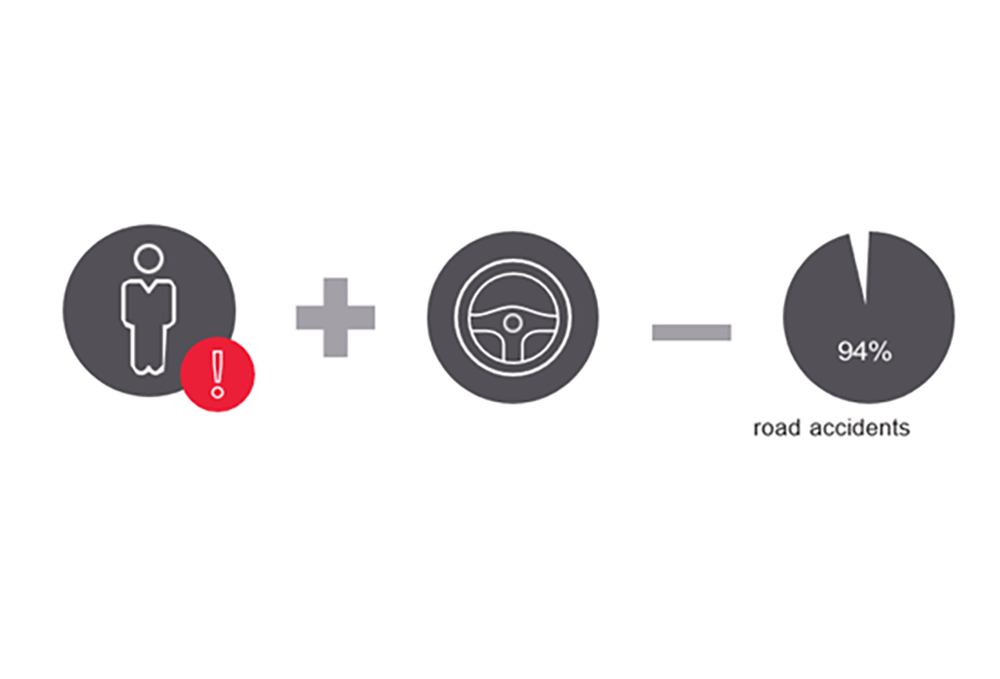
Los datos más recientes sugieren que los coches de autoconducción podrían reducir las muertes de tráfico hasta en un 90%. Los ADAS de los vehículos de producción actuales han alcanzado los niveles SAE L2 y L3, que en la mayoría de las situaciones de tráfico requieren que el conductor controle el vehículo. Muchos fabricantes de equipos originales y expertos de la industria creen que avanzar hacia la autonomía SAE L4 y L5 -donde el cinco representa a los vehículos que no requieren ninguna interacción humana- hará que nuestras carreteras sean más seguras.
Para alcanzar el siguiente nivel de autonomía de los vehículos, son necesarios muchos avances. Habrá inversiones masivas en tecnologías de sensores, como el radar, la cámara, que seguirán mejorando la exploración del entorno. Cada tipo de sensor tiene sus propias ventajas y desventajas. Tendrán que complementarse entre sí para garantizar que el proceso de detección de objetos tenga la redundancia necesaria y máxima seguridad posible.
También son necesarias enormes inversiones en algoritmos de software de gran potencia computacional para combinar y transportar la gran cantidad de datos de alta resolución de los sensores. El aprendizaje automático es el método establecido para entrenar algoritmos de automejora e inteligencia artificial. Esos algoritmos toman luego decisiones para garantizar la seguridad en situaciones de tráfico complejas. El entrenamiento de estos algoritmos con los estímulos más realistas disponibles, de forma repetible y controlada en el laboratorio, es crucial para su precisión y su despliegue seguro.
La distancia entre pruebas y simulación.
La recreación de un mundo virtual en el laboratorio, con una representación precisa de las escenas, además de los sensores y señales de radar reales, salvará la distancia entre la simulaci��n y las pruebas en carretera.
El reto actual es la simulación de escenas de radar completas, especialmente cuando las escenas son complejas y tienen muchas variables. El objetivo es probar a fondo todos los escenarios de conducción en el laboratorio, incluso los casos de esquina, antes de llevar el vehículo a la pista de pruebas o a las carreteras abiertas. La simulación de software se utiliza en el ciclo de desarrollo inicial. En última instancia, el software es una visión abstracta, y tiene imperfecciones y limitaciones.
Confiar únicamente en las pruebas en carreteras del mundo real tampoco es realista, ya que harían falta millones de metros para que los vehículos se convirtieran en seguros y fiables para circular por vías urbanas y rurales el 100% de las veces. Para probar realmente la funcionalidad de el ADAS, es necesario controlar todos los parámetros relevantes.
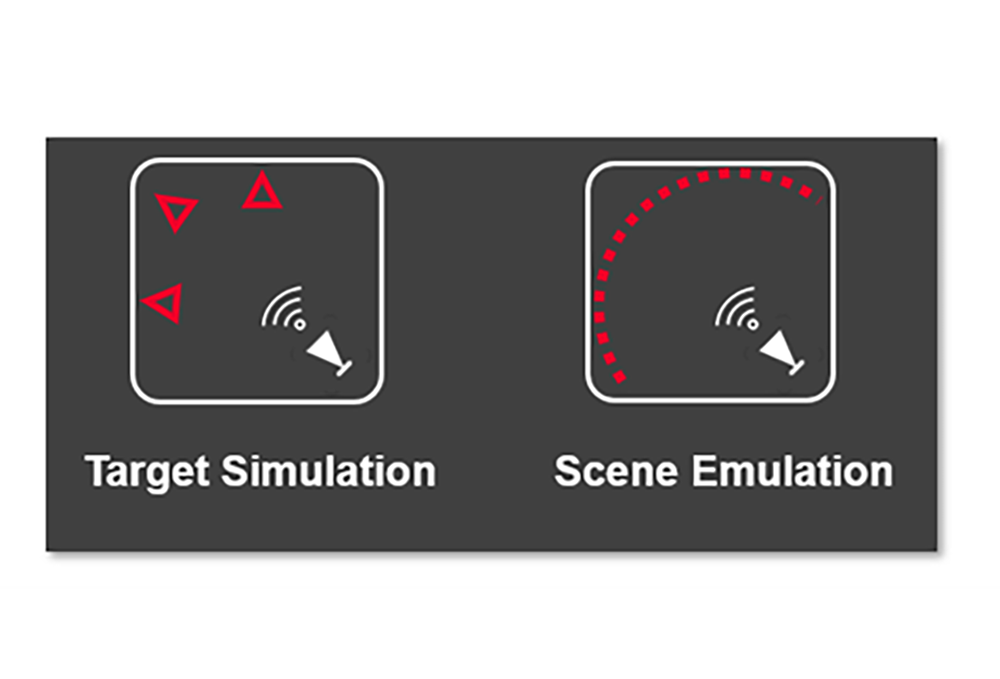
A la hora de emular objetivos de radar, existen actualmente varias lagunas tecnológicas:
- Número limitado de blancos y campo de visión: un enfoque común vincula cada blanco simulado a una línea de retardo. Aunque se añadan objetivos adicionales, sólo se procesa un eco de radar a la vez. Además, si se crea un conjunto de antenas, no es posible emular simultáneamente objetivos en los extremos del campo de visión del módulo de radar, lo que podría dar lugar a errores y a la pérdida de precisión en la representación de los objetivos, si no se recalcula.
- Incapacidad para generar objetos a distancias de 4m: muchos casos de prueba, requieren la emulación de objetos muy cerca de la unidad de radar. La mayoría de las soluciones de simulación de objetos que existen actualmente en el mercado están diseñadas para distancias largas.
- Menor resolución entre objetos: hasta hace poco, los simuladores de objetivos sólo podían generar un objeto como una firma de radar, lo que deja huecos en los detalles de la escena. Por ejemplo, en una intersección de varios carriles repleto de personas, los equipos de prueba deben diferenciar con precisión a todos los participantes en el tráfico. Con sólo un eco por objeto, el algoritmo podría no ser capaz de distinguir entre una bicicleta, poste, banqueta, etc.
Conclusión
Son esenciales para las pruebas en el mundo real. En el laboratorio, esto permitirá aumentar la cobertura de las pruebas para no sólo ahorrar tiempo, sino ejecutar y repetir con seguridad los escenarios de prueba.
Se necesita una nueva tecnología como las siguientes que vamos a mencionar para lograr que la simulación pueda recrear la veracidad, realidad y cambios constantes del entorno.
- Un mayor número de objetivos,
- Una distancia mínima más corta,
- Una mayor resolución
- Un campo de visión continuo
Es necesario cubrir todo el campo de visión del sensor, del mismo modo, es importante probar la capacidad del sensor de radar para detectar la altura de los objetos y el tráfico en carreteras de varias capas. Un ejemplo práctico: el vehículo no debe frenar cuando otro vehículo cruza por un paso elevado, sino detectar correctamente el paso elevado y pasar por debajo de él.
Las escenas de tráfico. Por ejemplo, en un semáforo en el que los coches no están a más de dos metros de distancia, las bicicletas pueden entrar en el carril o los peatones pueden cruzar de repente la carretera. Superar esta prueba es fundamental para las características de seguridad de un ADAS
La separación de objetos, la capacidad de distinguir los obstáculos en la carretera, es otra área de prueba para una transición más suave y rápida a los vehículos L4 y L5. Por ejemplo, un algoritmo de detección por radar tendrá que diferenciar entre un carril de un peatón mientras el coche circula por una autopista.
Las decisiones del software ADAS deben basarse en la imagen completa, no sólo en lo que permite el equipo de pruebas y poder pasarlo a la realidad.
Autonomía de vehículos en México y el mundo
En México y otros países será un reto enorme completar un máximo nivel de autonomía para todas las empresas automotrices. ¿Por qué? porque el sistema víal no es el mejor y la tecnología no ha llegado para que pueda distinguir y cubrir todas las variables que tienen tantos países como México. En México llegaron vehículos que tienen niveles bajos de autonomía, pero siguen muy lejos de un nivel máximo de autonomía como en el resto del mundo.
Te puede interesar: SISTEMA ADAS
Fuente: SILVIU TUCA - www.sae.org